
数字高程模型(Digital Elevation Model, DEM)作为地理信息系统数据库中最为重要的空间信息资料和赖以进行地形分析的核心数据系统,国家测绘部门将其作为国家空间数据基础设施建设的重要内容之一。随着全国多尺度DEM的相继建立,其正在科学研究、生产与国防建设中发挥越来越重要的作用。
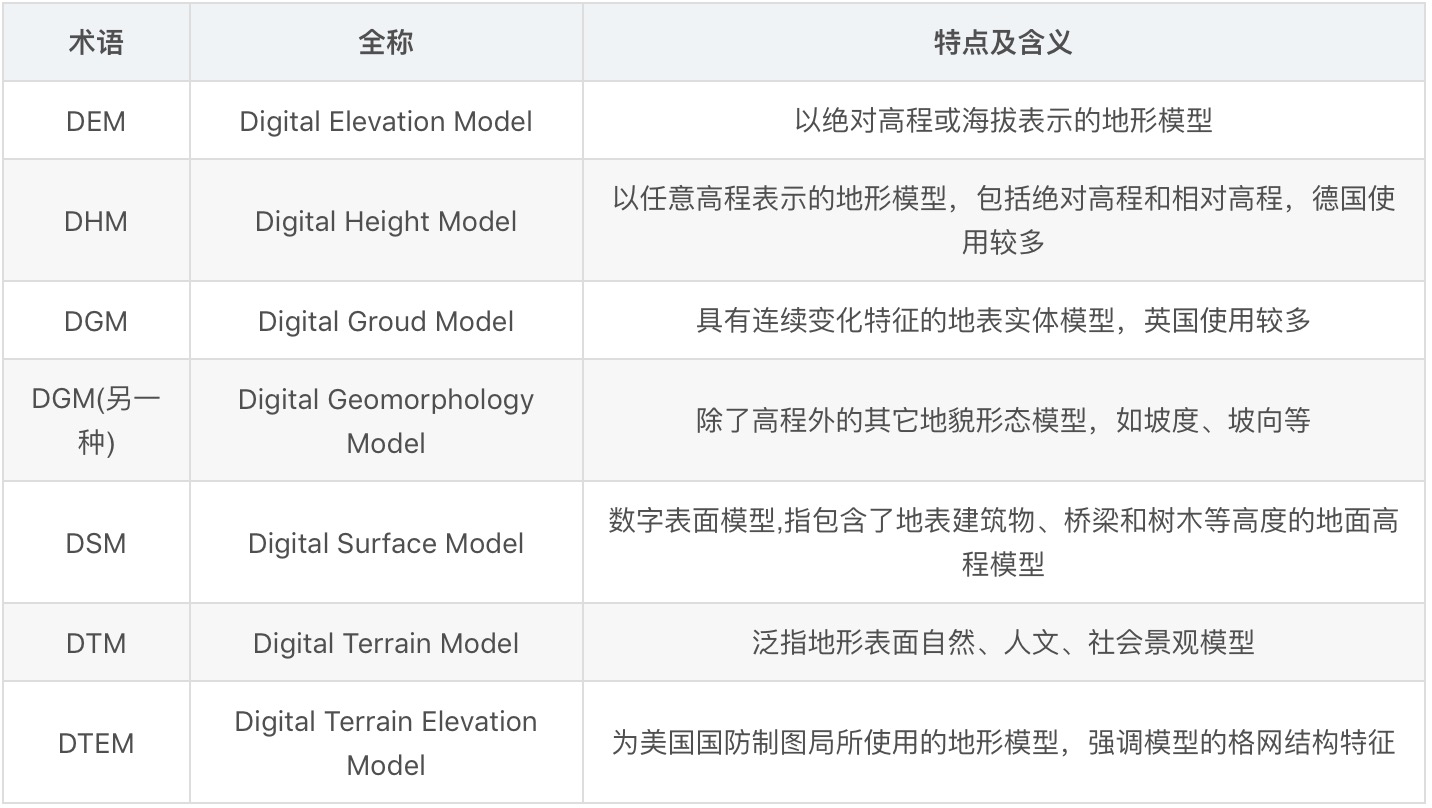
数字高程模型是通过有限的地形高程实现对地形曲面的数字化模拟或者说是地形表面形态的数字化表示。由于高程数据常常采用绝对高程或海拔(即从大地水准面起算的高度),DEM也常常成为DTM(Digital Terrain Mode,数字地形模型)。要说明的是由于“Terrain”一词含义比较广泛,不同专业背景对“Terrain”一词含义理解也不相同,DTM趋向于表达比DEM更为广泛的内容。
规则格网DEM数据在水平方向和垂直方向间隔相等,格网点的平面坐标隐含在行列号中,常采用矩阵结构存储,即按行(或列)逐一记录每一个网格单元的高程值。此外,还有采用行程编码结构、块状编码结构、四叉树编码结构等数据结构存储DEM数据的。
与格网DEM的规则数据阵列相比,不规则三角网DEM数据结构要复杂得多。由于三角形的不规则性,三角形的定义及其与相邻三角形的关系要显示表达出来,TIN(Triangulated Irregular Network,不规则三角网)模型不仅要存储每个顶点的高程,还要存储三角形顶点的平面坐标、顶点见的连接关系和邻接三角形等拓扑关系。
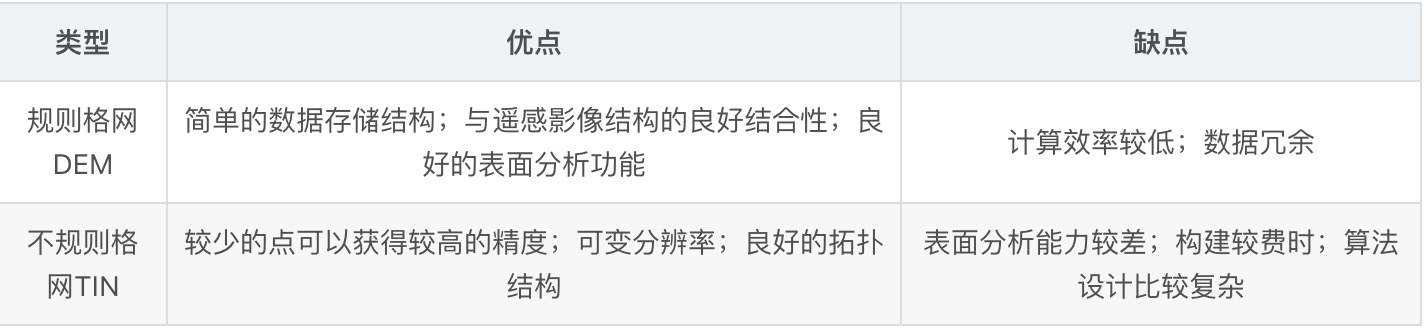
规则格网DEM和不规则三角网DEM是目前数字高程模型的两个主要的数据模型,两个模型各有特点,如表2所示
地形图容易获得,作业设备简单操作,对操作人员技术要求较低,因而地形图数字化是一种DEM数据获取的最基本方法。不论从哪种比例尺的地形图上采集DEM数据,最基本的问题都是对地形图进行数字化处理,如手扶跟踪数字化或者半自动扫描数字化,然后再用某种数据建模方法内插DEM,数字化后通过坐标转换处理以数字化仪坐标为基准的坐标转换到大地坐标系中。
通过数字摄影测量获取DEM数据的方法可分为两类:一类是全数字自动摄影测量方法,直接形成格网DEM;另一类是交互式数字摄影测量方法。全数字自动摄影测量方法采用规则格网采样,直接形成格网DEM,如果与GPS自动空中三角测量系统集成,则可形成内外业一体的高度自动化DEM数据采集技术流程;交互式数字摄影测量方法增加了人工干预和编辑的功能。
地图矢量化、摄影测量方法一般适合于大范围的DEM数据采集,而对于小范围内的DEM,其应用特点是服务于工程设计,对DEM精度要求相对较高,采用地形图数字化方法节能难以满足精度要求,而航测则成本较高,这时一般可以采用野外测量的方式获取数据建立DEM。野外数据采集所采用的仪器和手段,主要有平板测量、全站仪测量、GPS测量、车载GPS测量等。
合成孔径雷达干涉测量(InSAR)是近几十年发展起来的空间遥感新技术,它是传统的微波遥感与射电天文干涉技术相结合的产物。合成孔径雷达干涉测量通过对从不同空间位置获取同一地区的两个雷达图像利用杨氏双夹缝光干涉原理进行处理,从而获得该地区的地形信息。对于覆盖同一地区的两幅主、从雷达影像,可以利用相位解缠的处理算法来得到该区域的相位差图,也就是干涉图像,再经过基线参数的确定,就可以得到该地区的DEM数据。
机载激光扫描系统又称为机载激光雷达LiDAR。激光扫描不需要反光镜,还可以被看到,而且很少受到气候条件影响,测量精度高,因此机载激光扫描成为测绘困难地区(如密集的城区、森林地区)和物体(电力线等)的新技术。机载激光扫描利用主动遥感的原理,通过机载激光扫描系统发射出激光信号,经由地面反射后到达系统接受器,计算发射信号和反射信号之间的相位差或时间差,来得到地面的地形信息。对获得的激光扫描数据,利用其他大地控制信息将其转换到局部参考坐标系统即可得到局部坐标系统的三维坐标数据。对三维坐标系统数据进行滤波处理即可以得到DEM数据。
主要用于水下地表数字高程模型的建立。其原理是利用测深雷达、回声测深仪、SP2100波潮仪和ADCP海流计等仪器获取水深数据,再结合水体表面的GPS定位信息建立水下地表数字高程模型。该方法目前已在航道选址、河床分析、海底地形分析等领域得到广泛应用。